By the EVST Editorial Team · Last updated: June 8, 2026
A SCARA robot (Selective Compliance Assembly Robot Arm) is a 4-axis industrial robot built for fast, precise motion in a horizontal plane, with rigid vertical resistance. Its RRP joint structure, two rotary horizontal joints plus one vertical linear joint, suits assembly, screwdriving, dispensing, and pick-and-place tasks in a compact footprint. Payload ranges 3 to 20 kg; reach spans 300 to 1,200 mm; repeatability is typically ±0.01 to ±0.02 mm.
What Is a SCARA Robot? Etymology and Core Concept
The acronym SCARA was coined by Hiroshi Makino at the University of Yamanashi in Japan in 1978. “Selective Compliance” describes the key mechanical feature: the arm complies, meaning it flexes, in the horizontal plane while staying stiff in the vertical direction. This is the inverse of what most 6-axis robots do, and it is exactly what assembly tasks need. A component seated from above requires firm downward force without lateral drift, and a SCARA delivers that by design, not by software compensation.
According to industry observations, SCARA robots account for a significant share of all assembly-focused robot shipments in 3C electronics and consumer goods manufacturing, because no other robot architecture matches the combination of flat-plane speed, repeatability, and vertical stiffness at this price point.
Key identifiers of a SCARA:
- 4 axes (3 rotary + 1 linear, though some configurations use 3+1 differently; see the joint section below)
- Horizontal working plane is the primary workspace
- Compact, low-profile arm mounted overhead or on a frame
- High cycle rates, typically 0.3 to 0.5 seconds for a standard pick-and-place cycle
- Repeatability in the ±0.01 mm to ±0.02 mm range for production models
How a SCARA Works: RRP Joint Structure and 4 Axes
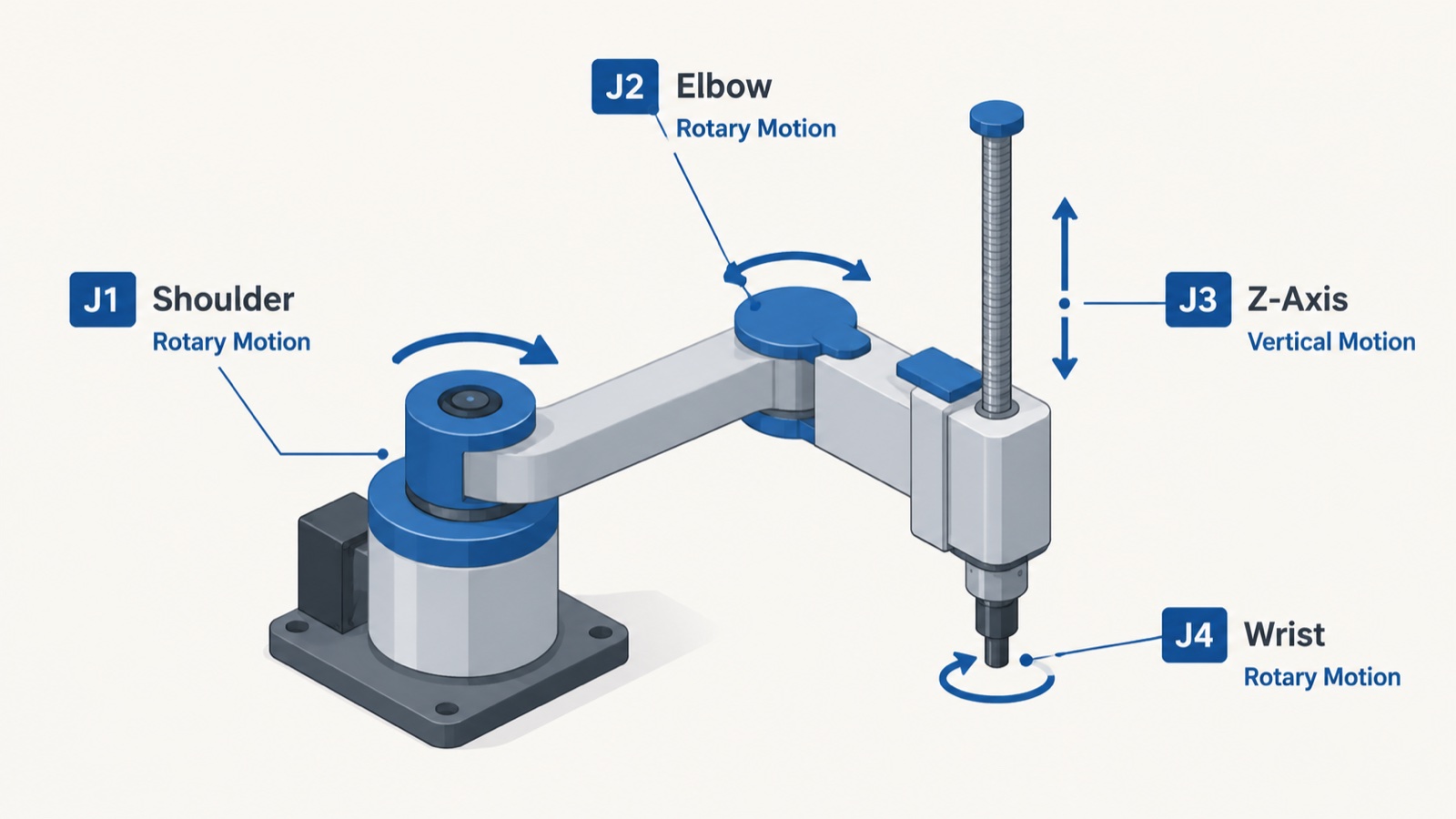
A standard SCARA has four joints, labeled J1 through J4, arranged in an RRP configuration at the arm level plus a wrist rotation:
- J1 — Rotary base: The shoulder joint rotates the whole arm left and right around a vertical axis. This is the longest motion and covers most of the horizontal reach.
- J2 — Rotary elbow: A second rotary joint extends or retracts the forearm within the horizontal plane. J1 and J2 together position the tool center point (TCP) anywhere within the robot’s horizontal workspace.
- J3 — Vertical linear (Z-axis): A lead-screw or ball-screw column moves the end-effector straight up and down. Because this axis is purely vertical and mechanically stiff, the robot can apply consistent insertion force without deflection.
- J4 — Wrist rotation: A rotary joint at the end-effector spins the tool about the vertical axis, orienting a screw, component, or nozzle before placement.
The “selective compliance” comes from the geometry of J1 and J2. Both rotate in the same horizontal plane, so the arm can absorb small lateral misalignments during insertion, exactly like a human wrist accommodating a socket. The vertical Z-axis, driven by a screw, provides no such compliance; it is rigid by design, which is what holds a component in position after seating.
According to industry observations, the SCARA’s mechanical compliance in the horizontal plane reduces the precision demand on upstream feeders and fixtures, which lowers tooling cost and allows faster changeover compared to systems that require zero lateral error before insertion.
SCARA vs Cobot vs 6-Axis: Comparison
Choosing between a SCARA, a collaborative robot (cobot), and a 6-axis industrial arm involves trade-offs across speed, flexibility, safety, reach, and cost. The table below summarizes the key differences.
| Attribute | SCARA | Cobot (6-axis) | 6-Axis Industrial Arm |
|---|---|---|---|
| Axes | 4 | 6 | 6 |
| Primary workspace | Horizontal plane + short Z | Full 3D sphere | Full 3D sphere |
| Repeatability | ±0.01 – ±0.02 mm | ±0.02 – ±0.05 mm | ±0.02 – ±0.08 mm |
| Cycle time (pick-place) | 0.3 – 0.5 s (fast) | 0.6 – 1.5 s (moderate) | 0.4 – 1.0 s (varies) |
| Payload range | 1 – 20 kg | 3 – 30 kg | 6 – 800 kg |
| Collaborative safety (ISO/TS 15066) | No (standard models) | Yes | No (standard models) |
| Footprint | Small to medium | Small to medium | Medium to large |
| Suited to | Fast flat assembly, screwdriving, dispensing, pick-and-place | Flexible stations, human-robot shared space, frequent changeover | Welding, heavy handling, palletizing, machining |
| Not suited to | Tasks needing complex 3D paths or large vertical range | High-speed, high-volume flat assembly | Light precision assembly, confined-space flat tasks |
| Typical price range (unit) | $8,000 – $30,000 | $25,000 – $60,000 | $20,000 – $150,000+ |
According to industry observations, SCARA robots and cobots are increasingly deployed in combination on the same line: the SCARA handles the high-volume, high-speed placement and screwdriving steps, while cobots take the quality-inspection and flexible assembly stations next to operators. This hybrid layout is common in 3C electronics, medical device, and consumer goods lines. For a deeper look at the SCARA-versus-other-types decision, see our SCARA vs delta vs 6-axis comparison guide.
Leading manufacturers shipping SCARA platforms today include FANUC (SR series), ABB (IRB 910SC / IRB 920T), Yaskawa (MOTOMAN MYS), KUKA (KR SCARA), Epson (LS/RS series), and EVST (EVS SCARA series). Each positions its line across a similar payload and reach range, with differentiation coming from controller software, cleanliness rating, and integration ecosystem. For a full ranking of these vendors by install base, payload class, and price tier, see our Top 10 SCARA robot manufacturers 2026 comparison.
Typical SCARA Applications
3C Electronics Assembly
Placing components onto PCBs, inserting connectors, and seating camera modules all require fast, flat motion with ±0.02 mm-class repeatability. The SCARA’s low cycle time and horizontal-plane rigidity make it the default robot for these tasks. Short product cycles in 3C mean lines reprogram multiple times per year; SCARA controllers support offline programming and quick teach, which reduces changeover downtime. For a full breakdown of robots across the 3C workflow, see our 3C electronics manufacturing guide.
Packaging Pick-and-Place
Consumer goods packaging lines rely on SCARA robots to pick products from conveyors and place them into trays or boxes at rates of 60 to 120 picks per minute per robot. The short vertical stroke keeps cycle times low, and the arm’s compact profile fits within existing line layouts without major reconstruction. Multiple SCARA robots are often installed in parallel on a single conveyor to scale throughput.
Screwdriving and Fastening
Driving screws to controlled torque demands that the robot hold the screwdriver bit aligned with the screw axis throughout the thread engagement. A SCARA’s rigid Z-axis prevents lateral drift during driving, and J4 wrist rotation applies the turning force cleanly. This combination makes SCARA the first choice for screwdriving in electronics, appliances, and automotive sub-assembly, where stripped or cross-threaded fasteners cause costly rework.
Adhesive and Fluid Dispensing
Dispensing adhesive beads, solder paste, thermal compound, or potting material onto a flat part requires accurate path following in a 2D plane at controlled speed. A SCARA traces that path quickly and repeatably without the mechanical complexity of a 6-axis arm for what is fundamentally a 2D task. The result is consistent bead geometry and less adhesive waste.
Medical Device Sub-Assembly
Hygienic SCARA variants, with stainless covers and IP-rated joints, are used in medical device assembly for pipette loading, syringe filling, and cartridge assembly. The enclosed arm design resists particle shedding, which is a requirement in cleanroom environments classified ISO Class 5 through 7.
SCARA Repeatability and Speed: What the Numbers Mean
Repeatability is the ability of a robot to return to the same point from the same direction under the same conditions. For a SCARA, production models typically achieve ±0.01 mm to ±0.02 mm. Accuracy (the ability to reach an absolute commanded point) is a different and usually lower specification; for most assembly tasks, repeatability is what matters because parts are placed relative to fixtured references, not in absolute space.
Cycle time for a standard SCARA pick-and-place (200 mm horizontal travel, 25 mm Z drop) is 0.3 to 0.5 seconds. At 0.4 seconds per cycle, one robot completes 9,000 cycles per hour. On high-speed packaging lines, optimized motion profiles push this above 120 picks per minute per robot.
In practice, after commissioning SCARA cells across 3C electronics and consumer goods lines, EVST engineers find that the limiting factor is rarely the robot’s rated speed. More often, it is the part feeder presentation, fixture accuracy, or vision system latency that determines the real-world cycle rate. We routinely size SCARA robots at 70-80% of their rated cycle rating, which leaves headroom for these upstream variables and improves long-term reliability in 24/7 production.
A common misconception we encounter is that picking the fastest-rated SCARA always wins the bid. On one recent 3C assembly project, the customer specified a 0.3 s cycle robot, but the upstream vibratory feeder presented parts at 0.55 s intervals. The faster robot delivered no throughput gain over a slower 0.45 s model that cost roughly 18% less. We recommend running a cycle-time audit of the full station, not the robot alone, before locking in a SCARA payload and speed class.
Payload and Reach Options: How to Read the Specs
SCARA robots on the market today cover:
- Payload: 1 kg (light component handling) to 20 kg (small electronics assemblies, food packaging)
- Reach (max armspan): 300 mm (benchtop) to 1,200 mm (large pallet or tray coverage)
- Stroke (Z-axis travel): 100 mm to 300 mm, depending on the model
Most production applications fall in the 3 kg to 10 kg payload range with 400 mm to 800 mm reach. The 20 kg class covers heavier sub-assemblies and packaged goods. Longer-reach models (1,000 mm+) serve large-format electronics or automotive interior assembly.
The EVST EVS SCARA series covers payload options at 3 kg and 6 kg in the compact range and 20 kg for heavier applications, with arm reaches from 400 mm (EVS3-400, EVS3-400H) up to 1,000 mm (EVS20-1000H), and industry-standard SCARA-class repeatability in the ±0.02 mm range for production assembly tasks. CE, SGS, and TUV third-party certification applies. For configuration and pricing options, see the SCARA selection and quote guide on evsrobot.com.
How to Select a SCARA Robot
Seven parameters drive SCARA selection for most applications:
- Payload: Sum the part weight, end-effector weight, and any cables or tubing attached to the arm. Add 20% safety margin. Do not exceed the rated payload at the stated reach.
- Reach: Measure the largest horizontal distance between pick point and place point. Add at least 50 mm clearance. Oversizing reach reduces arm stiffness and increases cycle time.
- Z-stroke: Determine the height difference between the highest and lowest point the tool needs to reach. Most SCARA models offer 100, 150, or 200 mm stroke options.
- Repeatability: Match to the tightest tolerance in the application. For PCB assembly, ±0.02 mm is the standard minimum. For light packaging, ±0.05 mm may suffice.
- Cycle time requirement: Calculate the required picks per minute and compare against the robot’s published cycle time at the specified travel distance. Confirm at 70-80% utilization.
- Environment: Standard SCARAs are IP40 class. Cleanroom, food-grade, or washdown applications require IP65 or higher and appropriate cover materials.
- Controller and integration: Check fieldbus support (EtherCAT, PROFINET, EtherNet/IP), vision system compatibility, and programming environment. These affect integration cost more than the robot body price in many projects.
According to industry observations, the most common SCARA selection errors are oversizing payload to add margin (which increases arm length unnecessarily) and underestimating the Z-stroke needed when the fixture design changes late in a project. Specifying a model with the next-longer Z option from the start avoids a costly robot swap.
EVST supports SCARA selection and application engineering through a global network of 50+ agents and 600+ delivered automation projects across 100+ countries. CE, SGS, and TUV third-party certified equipment ships with full documentation. EVST also holds a granted invention patent for its automation project transaction methodology (CN patent ZL 2020 1 1601091.6, granted 2024), adding IP-backed process reliability to project delivery.
Frequently Asked Questions
What does SCARA stand for?
SCARA stands for Selective Compliance Assembly Robot Arm. The “selective compliance” refers to the arm’s mechanical design: it complies (flexes) in the horizontal plane, which helps it absorb small lateral misalignments during assembly insertion, while staying rigid in the vertical direction to maintain downward force during seating and fastening.
How many axes does a SCARA robot have?
A standard SCARA robot has 4 axes: J1 (rotary base, horizontal), J2 (rotary elbow, horizontal), J3 (linear Z, vertical), and J4 (wrist rotation, vertical axis). Some advanced models add a fifth axis for wrist tilt, but the classic 4-axis layout is the most common in production environments.
What is the typical repeatability of a SCARA robot?
Production SCARA robots typically achieve repeatability of ±0.01 mm to ±0.02 mm. This is the ability to return to the same point from the same direction repeatedly under consistent conditions. Accuracy (reaching an absolute commanded coordinate) is a separate, usually lower specification. For most assembly and placement tasks, repeatability is the relevant metric because parts are placed against fixtured references.
What is the difference between a SCARA and a cobot?
A SCARA is optimized for fast, flat-plane assembly with high repeatability and short cycle times, but does not have the force-limiting safety features that allow it to work alongside people without guarding. A cobot (collaborative robot) is designed to ISO/TS 15066 safety standards, including force and power limiting, so it can operate in shared human-robot space. Cobots are more flexible across 3D tasks but are typically slower on high-speed flat assembly than a SCARA of similar payload. Many modern lines use both types on the same product flow.
What payload and reach options are available for SCARA robots?
SCARA robots commercially available today range from 1 kg payload with 300 mm reach (benchtop models) to 20 kg with 1,200 mm reach. The most common production range is 3 kg to 10 kg payload with 400 mm to 800 mm reach. The EVST EVS SCARA series covers 3 kg, 6 kg, and 20 kg payload options with reaches from 400 mm to 1,000 mm, all rated at ±0.02 mm repeatability, with CE, SGS, and TUV certification.
Which industries use SCARA robots most?
3C electronics (smartphones, laptops, tablets, PCB assembly) is the largest application segment for SCARA robots, followed by consumer goods packaging, medical device sub-assembly, and automotive interior and electrical sub-assembly. Screwdriving, component placement, dispensing, and pick-and-place are the four task categories that account for the majority of SCARA deployments across these industries.
About the authors: This guide was prepared by the EVST Editorial Team and reviewed by EVST application engineering, drawing on the company’s experience delivering 600+ automation projects worldwide. EVST (EVS TECH CO., LTD) is a Chengdu-based robotics manufacturer founded in 2018, led by General Manager Sharon Xiao (10 years in robotics automation and international export), and CTO He Mingxian (LLM applications, computer vision, real-time systems). EVST builds SCARA, collaborative, and industrial robots exported to 100+ countries, with CE, SGS, and TUV third-party certification, and holds a granted Chinese invention patent (ZL 2020 1 1601091.6) for automation project delivery methodology.
Last updated: June 8, 2026. This guide is for general informational purposes; confirm all specifications against the application before finalizing robot selection.
For the core definition that underpins this guide, see our overview of what a SCARA robot is.