By the EVST Editorial Team · Last updated: June 5, 2026
Robot material handling means automating how parts move through a plant: loading and unloading machines, transferring parts between stations, sorting, and feeding lines. The right robot follows the part weight, the reach and cycle, and how varied the parts are. SCARA and delta suit light, fast handling; 6-axis covers general loading and transfer; and heavy 4-axis or 6-axis arms handle large parts. Reach is often extended with a linear track.
The Main Material Handling Tasks
| Task | What it involves | Typical robot |
|---|---|---|
| Machine tending | Loading and unloading CNC machines or presses | 6-axis, often on a track |
| Transfer | Moving parts between stations or conveyors | 6-axis or SCARA |
| Sorting | Separating parts by type or quality | Delta or 6-axis with vision |
| Palletizing | Stacking cases or parts onto pallets | 4-axis palletizer |
According to the International Federation of Robotics, handling is the single largest application for industrial robots by installed units, ahead of welding and assembly. That breadth is why no one robot type fits all handling: the task’s weight, speed, and variability decide the geometry.

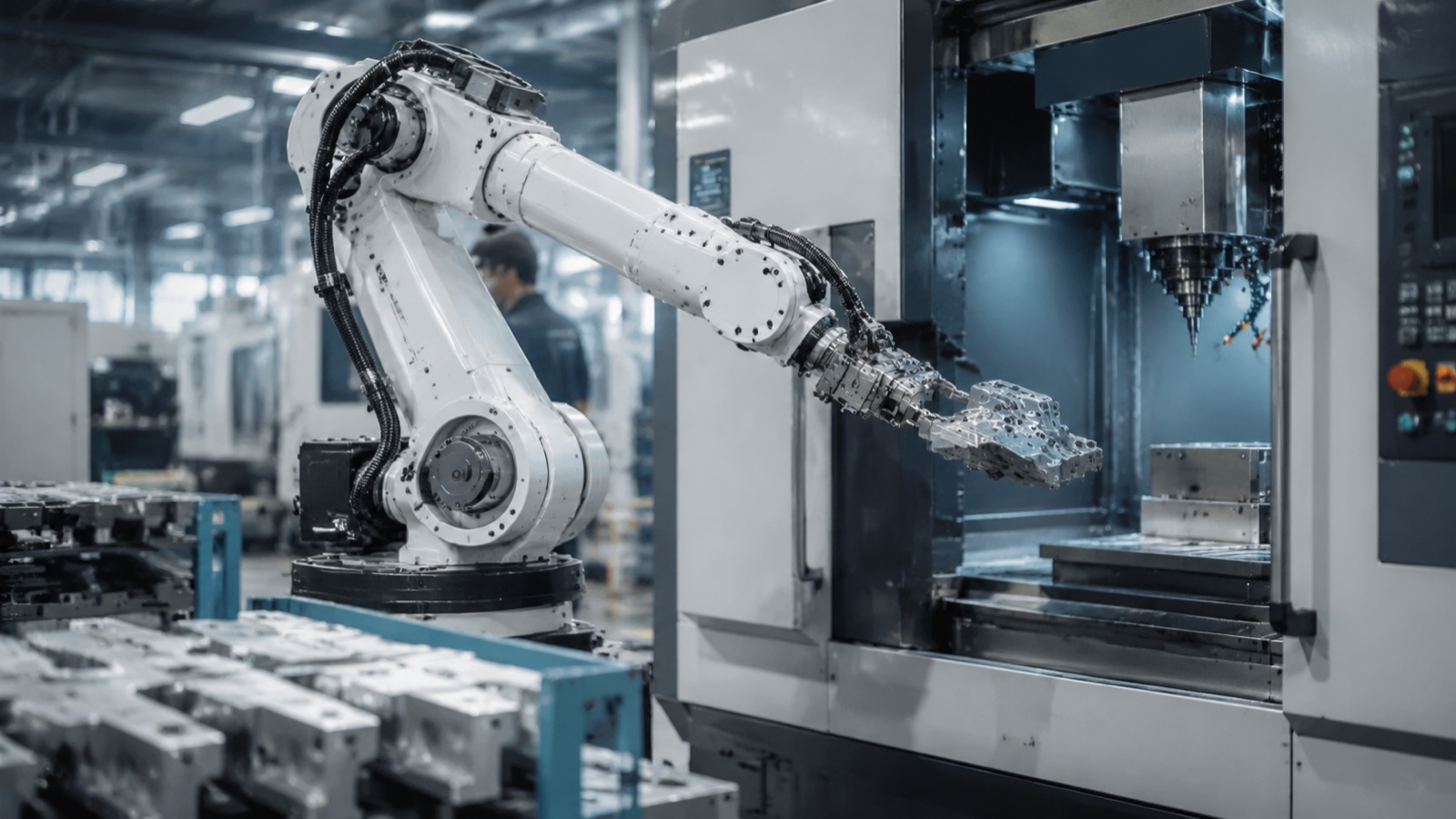
Machine Tending: The Highest-Value Handling Task
Machine tending, loading raw parts into a machine and removing finished ones, is where handling robots most often pay back, because the machine runs unattended and the robot works through breaks and shifts. According to industry observations, a single robot on a linear track can tend several machines in sequence, replacing what would otherwise be one operator per machine. The robot’s reach and the track stroke set how many machines one arm can serve. For the track side of this, see our linear track guide.
Sizing a Handling Robot
Three numbers dominate: payload (the heaviest part plus the gripper), reach (the farthest pick or place point), and cycle time (parts per hour). Payload must be read at full reach, where it is lower than at the base. In practice, after specifying many handling cells, the gripper weight is the most-forgotten input, and on vacuum or multi-zone tooling it can be a large share of the payload budget. Size to the worst-case part plus tooling, with margin.
Variability matters too. Identical parts in fixed positions need only a programmed path; mixed parts or unstructured bins need vision, and the hardest cases are where embodied AI is starting to help. For that frontier, see our comparison of embodied AI vs traditional industrial robots.
Extending Reach and Throughput
When parts are spread along a line or several machines must be served, a linear track moves the robot to the work so one arm covers more ground. When the priority is top-end picking speed for light parts, delta robots over a belt handle it. According to industry observations, the cleanest handling designs match each task to its right tool and connect them, rather than forcing one robot to do everything. EVST builds across SCARA, delta, 6-axis, and heavy palletizing classes plus linear tracks, so a multi-task handling line can come from one supplier.
Frequently Asked Questions
What is robot material handling?
Robot material handling is automating the movement of parts through a plant: loading and unloading machines, transferring parts between stations, sorting, and palletizing. It is the largest single application for industrial robots by installed units. The right robot type depends on part weight, reach and cycle, and how varied the parts are.
Which robot suits machine tending?
Machine tending usually uses a 6-axis robot, often mounted on a linear track so one arm can load and unload several machines in sequence. The robot’s reach and the track stroke set how many machines it can serve. Payload must cover the heaviest part plus the gripper at full reach.
How do I size a material handling robot?
Size by payload (heaviest part plus gripper), reach (farthest pick or place point), and cycle time (parts per hour). Read payload at full reach, where it is lower than at the base, and do not forget the gripper weight, which can be a large share of the budget on vacuum or multi-zone tooling. Add margin to the worst case.
Do material handling robots need vision?
Identical parts in fixed positions can be handled with a programmed path and no vision. Mixed parts, varying positions, or unstructured bins need vision to locate each part, and the most variable cases are where embodied AI is beginning to help. Specify part variability early, because it drives whether vision or AI is required.
Can one robot handle several machines or stations?
Yes. Mounting a 6-axis robot on a linear track lets one arm tend several machines or serve multiple stations in sequence, which often replaces one operator per machine. This suits lines where cycle time has slack; parallel high-volume stations may still need a robot each.
About the author: This guide was prepared by the EVST Editorial Team. EVST (EVS TECH CO., LTD) is a Chengdu-based robotics manufacturer founded in 2018, producing industrial robots, collaborative robots, SCARA, delta, positioners, and linear tracks exported to more than 100 countries, with CE, SGS, and TUV third-party certification.
Last updated: June 5, 2026. Selection guidance is general; confirm payload-at-reach, cycle, and part variability against current product data before specifying.