
By the EVST Editorial Team · Last updated: June 1, 2026
A robot linear track, also called a 7th axis or ground rail, is a motorized rail that carries an industrial robot along its length so the arm can reach beyond its fixed envelope. It turns a stationary robot into a traveling one that can serve several workstations or weld long seams in one pass. You need one when the work is longer than the robot’s reach, and the choice hinges on stroke, payload, and positioning repeatability.
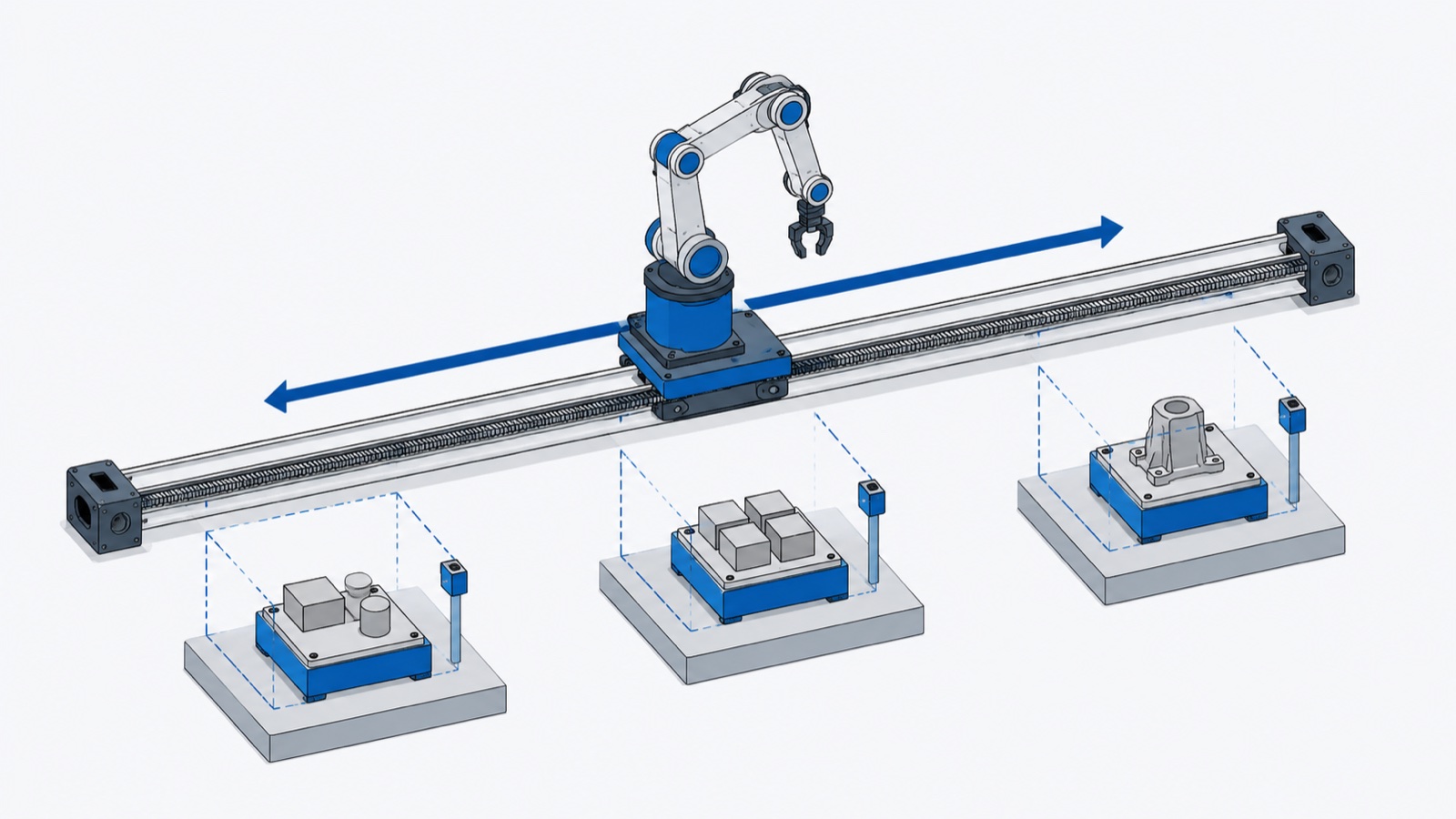
What a Robot 7th Axis Does
A standard 6-axis industrial robot has a fixed reach, often between one and three meters. Many real tasks are larger than that: a four-meter chassis rail, a line of CNC machines, or a long structural beam. Mounting the robot on a linear track adds a seventh controlled axis of travel, so the arm physically moves to the work instead of the work being shuttled to the arm.
Because the track is a controlled axis, the robot controller knows the carriage position at every moment. That allows the track to be part of a coordinated motion group, where the carriage and the arm move together. According to industry practice, this is what lets a robot lay a continuous weld along a multi-meter seam without the start-stop marks that appear when a part is repeatedly re-indexed under a fixed arm.
When You Actually Need a Linear Track
A track earns its cost in a few clear situations:
- Long workpieces: beams, frames, rail cars, and pipe spools longer than the robot’s reach.
- Multiple stations: one robot serving two or more fixtures or machines along the rail, instead of buying a robot per station.
- Machine tending lines: loading and unloading a row of presses or CNC machines.
- Mixed handling and welding: moving heavy parts between operations along a single transport path.
According to industry observations, the economic case is strongest when a track lets one robot replace what would otherwise be two or three fixed robots. The rail and its drive cost far less than duplicate arms, controllers, and the floor space they need. The trade-off is cycle time: a traveling robot serves stations in sequence, so a track suits work where takt time has slack, not the fastest high-volume lines.
How Linear Tracks Are Specified
Three numbers define a track, and they should be read alongside the robot it carries.
| Specification | What it means | Why it matters |
|---|---|---|
| Stroke (travel length) | Usable distance the carriage moves, customized to the cell | Sets how long a part, or how many stations, one robot can serve |
| Carriage payload | Mass the rail carries: robot plus dress-out and tooling | Must cover the robot’s own weight, not just its payload |
| Travel speed | Maximum linear velocity of the carriage | Affects how fast the robot repositions between stations |
| Position repeatability | How precisely the carriage returns to a commanded point | Decides whether the robot finds the joint after every move |
A frequent mistake is sizing carriage payload to the part rather than to the robot. The rail carries the entire robot, its cabling, and any arm-mounted equipment, which for a heavy industrial arm can run to several hundred or even thousands of kilograms. EVST’s linear tracks, as an example, are built for robot loads up to 4000 kg with positioning repeatability around ±0.1 mm and travel speeds up to 20000 mm/min, with stroke length customized to the cell layout rather than sold in fixed lengths.
According to the International Federation of Robotics, robot installations remain near record levels as manufacturers automate larger and more varied parts, which is the trend driving demand for travel axes that let one robot cover work a fixed arm cannot reach.
Floor-Mounted vs Inverted and Walking-While-Welding
Tracks are most often floor-mounted, but the robot can also hang from an inverted gantry rail to clear the floor for fixtures and operators. The choice depends on access, chip and spatter fallout, and how parts are loaded.
A related approach is changing the balance between precision rails and software. Some modern welding systems reduce dependence on a high-precision track by using 3D vision and on-the-fly seam finding, so the robot can weld while moving across ordinary floor without a machined rail under every meter. EVST’s AI welding system, for instance, includes a walking-while-welding capability and SLAM-based navigation that lets a robot weld continuously across the floor and move between stations on its own. That does not replace tracks everywhere, but it widens the options for plants that cannot justify long precision rails.
Track, Positioner, and Robot as One Cell
In practice a linear track is one part of a coordinated cell. The track moves the robot to the work, a positioner orients the part to keep seams flat, and the robot lays the weld. For how the orienting fixture is chosen, see our guide to single-axis, 2-axis, and 3-axis welding positioners, and our complete guide to robotic welding for the full cell view.
Specifying these elements separately and matching them on site is where many projects lose time. EVST supplies the robot, track, and positioner as one commissioned system, drawing on a full-range product line and turnkey integration so the motion group is tuned as a whole. Its field engineers handle on-site commissioning across more than 100 countries, and the hardware carries CE, SGS, and TUV third-party certification.
Frequently Asked Questions
What is a robot 7th axis?
A robot 7th axis is a motorized linear track, or ground rail, that carries an industrial robot along its length. It adds one controlled axis of travel beyond the robot’s six joints, so the arm can move to the work and reach beyond its fixed envelope. Because it is a controlled axis, it can move in coordination with the robot during a task such as welding a long seam.
When do I need a linear track instead of a second robot?
A linear track makes sense when one robot can serve several stations or a long workpiece in sequence and the takt time has enough slack to allow travel between points. The rail costs far less than duplicate robots and controllers. A second fixed robot is the better choice when stations must run in parallel at high volume, where travel time would become the bottleneck.
How is linear track payload specified?
Track payload is the mass the carriage carries, which is the robot itself plus its cabling and any arm-mounted tooling, not the part being handled. A heavy industrial arm can require a carriage rated for several hundred to a few thousand kilograms. EVST tracks, for example, are built for robot loads up to 4000 kg with stroke length customized to the cell.
What positioning accuracy do linear tracks offer?
Robotic linear tracks typically offer positioning repeatability around ±0.1 mm, which is precise enough for the robot to find the joint after each move when combined with the arm’s own repeatability and, where used, vision-based seam finding. The exact figure varies with track length and carriage load.
Can a robot weld while moving on a track?
Yes. When the track is part of a coordinated motion group, the robot controller drives the carriage and the arm together, so the robot can lay a continuous weld along a long seam in one pass. Some systems also add 3D vision and walking-while-welding software to reduce dependence on high-precision rails over the full travel.
About the author: This guide was prepared by the EVST Editorial Team. EVST (EVS TECH CO., LTD) is a Chengdu-based robotics manufacturer founded in 2018, producing industrial robots, collaborative robots, welding positioners, and linear tracks exported to more than 100 countries, with CE, SGS, and TUV third-party certification.
Last updated: June 1, 2026. Specifications described are indicative industry and manufacturer ranges; confirm stroke, carriage payload, and repeatability against current product data before specifying.