By the EVST Editorial Team · Last updated: June 3, 2026
Choosing an industrial robot starts with four specifications: payload (part plus tooling), reach (the work envelope), the number of axes, and required speed or cycle time. From there, the robot type follows: SCARA for fast flat assembly, 6-axis for complex paths, delta for high-speed picking, and cobots where the robot works near people. The right choice is the simplest robot that meets payload-at-reach within the cycle time, then matched on environment and certification.
The Four Numbers That Drive Every Selection
| Specification | What it means | Common mistake |
|---|---|---|
| Payload | Part plus gripper and arm-mounted tooling | Forgetting the tooling weight |
| Reach | The farthest point the arm must work | Ignoring payload drop-off at full reach |
| Axes | Degrees of freedom for the path | Buying more axes than the path needs |
| Speed / cycle | Parts per hour at required accuracy | Rating speed without load or accuracy |
According to industry observations, most over- and under-buying traces back to these four. Payload must be read at the farthest reach, not the base, and axes should match the path: a flat pick-and-place rarely needs six axes, while a contoured weld or spray path does. EVST publishes payload-at-reach curves across its range for exactly this reason.
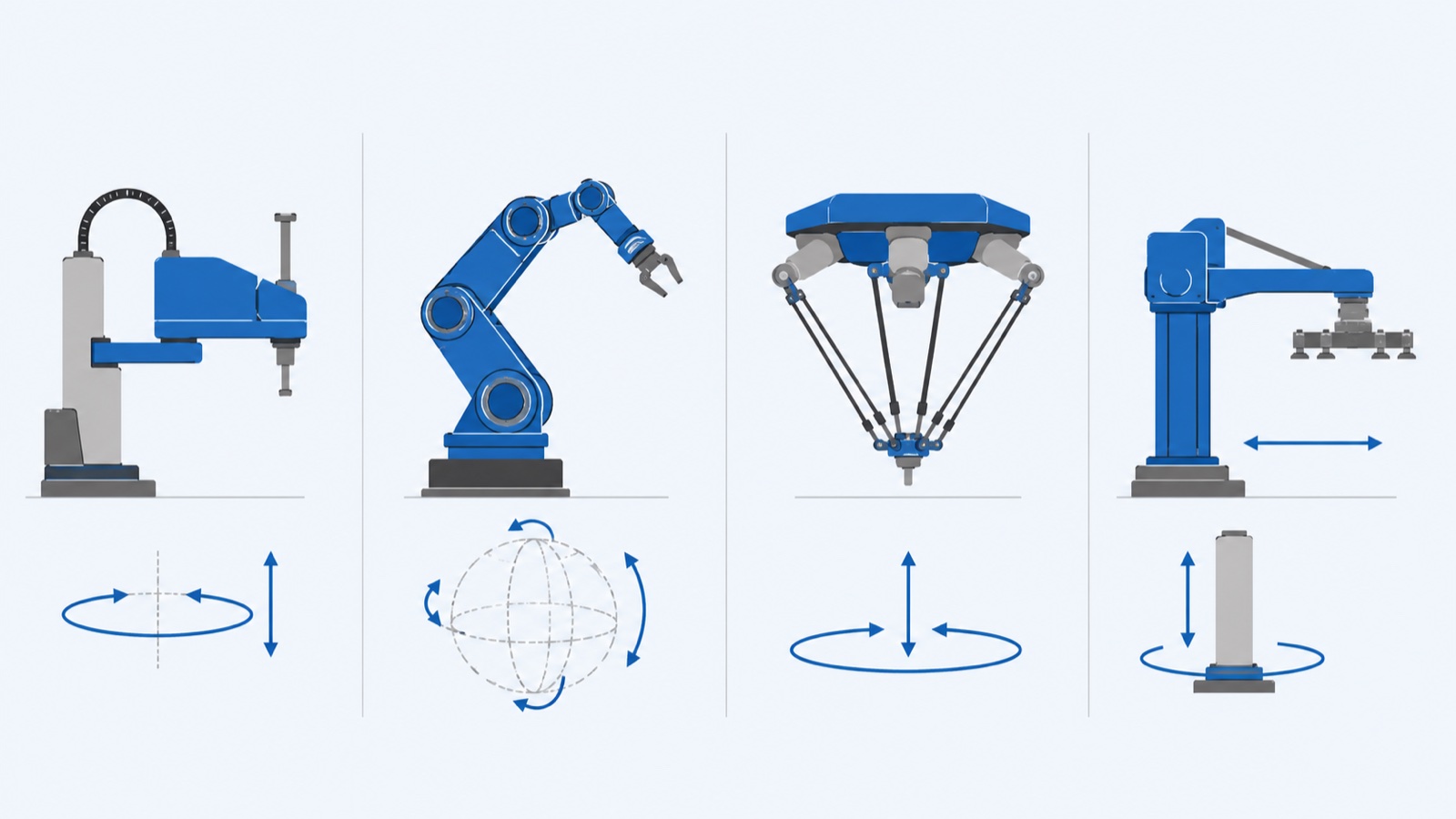
Matching Robot Type to the Job
- SCARA (4-axis): fast, rigid, and accurate in a flat plane. Suited to 3C electronics assembly, pick-and-place, and screwdriving where Z-motion is short.
- 6-axis articulated: the general-purpose workhorse for welding, handling, machine tending, and any task needing complex orientation.
- Delta (parallel): very high-speed picking and sorting of light parts, common in food and packaging.
- Collaborative (cobot): tasks that share space with people or change often, at safety-rated speed.
- 4-axis palletizing: heavy, repetitive stacking where only vertical-axis orientation is needed.
According to the International Federation of Robotics, articulated 6-axis robots remain the largest installed type, but SCARA, delta, and collaborative robots are growing as lines diversify. The decision is rarely about one type being better; it is about which one meets the path and cycle with the least cost and complexity.
Payload and Reach: Read Them Together
A robot’s rated payload applies near the wrist; at full reach the safe payload is lower. In practice, after specifying many cells, the reliable method is to plot the heaviest part, its tooling, and the farthest placement point, then pick the smallest model whose payload-at-reach curve clears all three with margin. This avoids the common outcome of a robot that meets payload on paper but stalls or sags at the edge of its envelope.
Environment, Speed, and Certification
Two jobs with identical payload and reach can need different robots once environment and cycle enter. High heat, dust, washdown, or explosion risk narrow the field to sealed or certified models. Tight cycle time can rule out a cobot whose safety-rated speed cannot hit the required parts-per-hour, pushing the choice to a fenced industrial arm. According to industry observations, cycle time, not weight, is the most frequent reason a project moves from a collaborative to an industrial robot.
Certification also depends on the market and sector: automotive lines often require IATF16949-grade manufacturing, hazardous areas require ATEX or IECEx, and export markets expect CE, SGS, or TUV. A full-range supplier such as EVST can keep the same project across SCARA, 6-axis, delta, cobot, and heavy palletizing classes, which avoids mixing vendors as requirements shift. For supplier evaluation, see our guide to evaluating a China robot supplier; for budgeting, the industrial robot price guide.
A Simple Selection Sequence
- List the heaviest part and its tooling; that sets minimum payload.
- Mark the farthest work point; that sets reach, read against the payload curve.
- Describe the path; that sets the axis count and robot type.
- Set the cycle time; that confirms speed and rules cobot in or out.
- Add environment and certification; that narrows to specific models.
Run in this order, the model usually selects itself. When two classes still fit, the simpler and lower-cost one generally wins on total cost of ownership.
Frequently Asked Questions
What specifications matter most when choosing an industrial robot?
Payload (part plus tooling), reach (the farthest work point), the number of axes, and speed or cycle time. Payload must be read at full reach, not at the base, because it drops off at extension. Axes should match the path: flat pick-and-place rarely needs six, while contoured welding or spraying does.
How do I know whether to use a SCARA, 6-axis, delta, or cobot?
Match the type to the path and cycle. SCARA suits fast flat assembly, 6-axis handles complex orientation and welding, delta excels at high-speed light picking, and cobots fit shared-space or frequently changing tasks at safety-rated speed. Choose the simplest type that meets the path within the required cycle time.
Why does payload drop at full reach?
The farther the arm extends, the larger the moment on its joints, so the safe payload at full reach is lower than the rating near the wrist. This is why payload and reach must be read together using the payload-at-reach curve, and why specifying on headline payload alone can leave a robot unable to work at the edge of its envelope.
When should I choose an industrial robot over a cobot?
Choose an industrial robot when cycle time requires fast continuous motion that a safety-rated cobot cannot meet, when payload exceeds the collaborative range (about 30 kg), or when the task is fully guarded anyway. Cobots win when the robot must share space with people or when changeovers are frequent.
Does the robot supplier’s range matter?
Yes, when requirements span types or grow over time. A full-range supplier can keep one project across SCARA, 6-axis, delta, cobot, and heavy palletizing without switching vendors as payload, environment, or certification needs change. It also simplifies support, spares, and integration across a multi-cell line.
About the author: This guide was prepared by the EVST Editorial Team. EVST (EVS TECH CO., LTD) is a Chengdu-based robotics manufacturer founded in 2018, producing industrial robots, collaborative robots, welding positioners, and linear tracks exported to more than 100 countries, with CE, SGS, and TUV third-party certification.
Last updated: June 3, 2026. Selection guidance is general; confirm payload-at-reach, cycle, and certification against current product data before specifying.