
By the EVST Editorial Team · Last updated: June 6, 2026
Robotic bin picking is a robot taking parts that are piled randomly in a container, one at a time, without fixturing. It needs 3D vision to find each part’s position and orientation in the pile, software to plan a collision-free grasp, and a robot and gripper that can reach into the bin. It is one of the hardest tasks to automate, and it is where AI and 3D vision are advancing fastest in 2026.
Why Bin Picking Is Hard
Most automation assumes parts arrive in known positions. Bin picking removes that: parts overlap, tilt, and bury each other, and every cycle is different. The robot must locate a pickable part in the clutter, choose a grasp that will not collide with the bin wall or other parts, pick it, and often re-orient it for the next station. According to industry observations, the limiting factors are rarely the robot arm; they are the 3D vision’s ability to resolve parts in clutter and the software’s ability to plan a reliable grasp fast enough to meet cycle time.
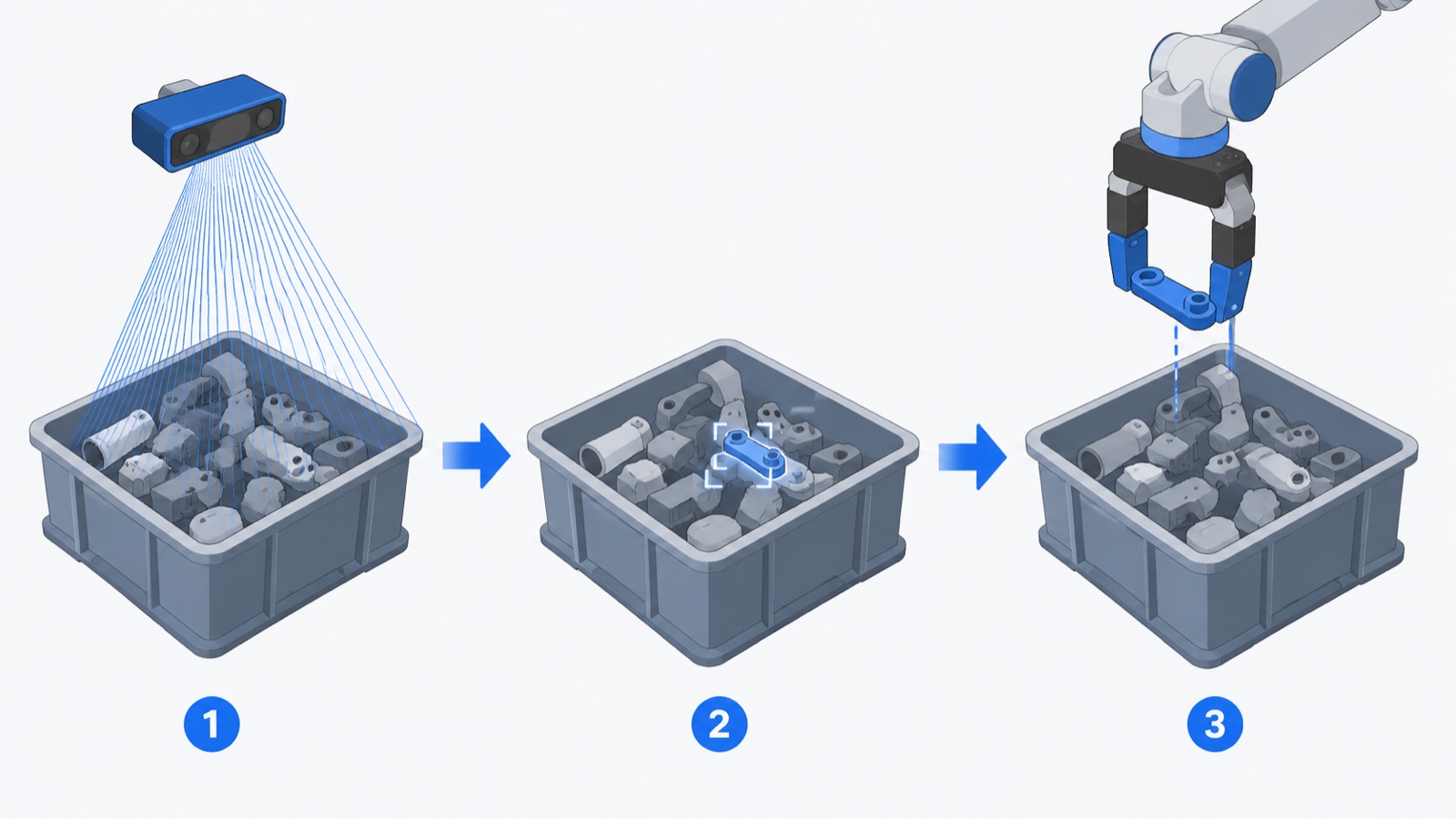
The Four Elements of a Bin Picking Cell
| Element | Role |
|---|---|
| 3D vision | Builds a point cloud of the bin and locates pickable parts |
| Grasp planning software | Chooses a collision-free grasp for the robot and gripper |
| Robot | Reaches into the bin at the planned pose |
| Gripper | Vacuum, magnetic, or finger gripper suited to the part |
According to industry observations, the gripper choice is as decisive as the vision: a vacuum cup handles flat or smooth parts well but struggles with porous or irregular ones, while a finger gripper reaches between piled parts but needs more clearance. Matching gripper to part is half of a working bin picking cell.
Where AI Changes Bin Picking
Traditional bin picking matches each scanned part against a known CAD model. That works for one part type but breaks when parts vary or are unknown. This is where embodied AI is changing the task: learned models can generalize to parts they were not explicitly programmed for, picking varied or novel items from a bin. According to industry observations, this is one of the clearest near-term payoffs of AI in manufacturing, because random, mixed bins were previously hard to automate at all. For the wider shift, see our comparison of embodied AI vs traditional industrial robots.
In practice, 2026 bin picking is a spectrum: known single-part bins run reliably with 3D vision and CAD matching, while mixed or unknown-part bins are where AI-based grasping is emerging and still maturing. The right approach depends on how varied your parts are.
When Bin Picking Pays Off
- Parts delivered loose in bins or totes that today need manual sorting or fixturing.
- Upstream of a machine or assembly where presenting singulated parts is the bottleneck.
- Where part presentation is the reason a task is still manual.
Bin picking is not always the answer: if parts can be delivered singulated cheaply, a 2D-guided pick is faster and more reliable. The decision turns on whether removing the bin’s randomness is worth the cost. For how vision underpins all of this, see our machine vision guide. EVST integrates 3D vision bin picking cells and can advise whether the application is ready for it.
Frequently Asked Questions
What is robotic bin picking?
Robotic bin picking is a robot taking parts that are piled randomly in a container, one at a time, without fixturing. It combines 3D vision to locate parts in the clutter, software to plan a collision-free grasp, and a robot and gripper that can reach into the bin. It is one of the hardest manufacturing tasks to automate reliably.
Why is bin picking so difficult?
Because every cycle is different: parts overlap, tilt, and bury each other, so the robot must locate a pickable part in clutter and plan a grasp that avoids the bin wall and other parts, fast enough to meet cycle time. The limits are usually the 3D vision resolving parts in clutter and the grasp-planning software, not the robot arm.
What role does AI play in bin picking?
Traditional bin picking matches scanned parts to a known CAD model, which breaks for varied or unknown parts. AI-based grasping can generalize to parts it was not explicitly programmed for, so it can pick mixed or novel items from a bin. This is one of the clearest near-term payoffs of embodied AI in manufacturing, though it is still maturing in 2026.
What gripper is used for bin picking?
It depends on the part. Vacuum cups handle flat or smooth parts well but struggle with porous or irregular ones; finger grippers can reach between piled parts but need more clearance; magnetic grippers suit ferrous parts. Matching the gripper to the part is as decisive as the vision system for a working cell.
When should I not use bin picking?
If parts can be delivered singulated cheaply, for example on a belt or in trays, a 2D-guided pick is faster and more reliable than bin picking. Bin picking pays off when removing the bin’s randomness is the bottleneck and singulation upstream is impractical or costly. The decision turns on part presentation, not the robot.
About the author: This guide was prepared by the EVST Editorial Team. EVST (EVS TECH CO., LTD) is a Chengdu-based robotics manufacturer founded in 2018, integrating 3D-vision robot cells alongside industrial and collaborative robots, exported to more than 100 countries with CE, SGS, and TUV third-party certification.
Last updated: June 6, 2026. This is a general overview of a fast-moving area; confirm vision, gripper, and cycle feasibility against your parts before committing.