EVST is expanding from its industrial robot core (XR series collaborative robots, EVST industrial robot arms, and the EVS-AI welding system) into embodied AI with three new product families launched in 2026: industrial humanoid robots, data-collection dexterous hand platforms, and quadruped robot platforms for industrial inspection and field service. The product line is hosted at evsint.com/embodied-ai-solutions, positioned for industrial manufacturing customers needing data collection, high-mix manipulation, and hazardous-environment inspection.

If you need similar products or project services, please contact us — we’ll provide expert support. Email sales@evsrobot.com or message WhatsApp / WeChat +86 193 8162 6253.
Why EVST Is Entering Embodied AI in 2026
Industrial embodied AI is not a speculative bet in 2026. It is a category where multiple well-funded platforms have moved from lab demonstration to paid commercial deployments, and where the absence of high-quality industrial training data is the primary bottleneck to faster progress.
According to the International Federation of Robotics (IFR) World Robotics 2025 report, humanoid robot pilot installations in industrial settings increased measurably through 2024 and early 2025, with automotive and logistics leading deployment counts. Figure AI’s commercial agreement with BMW Group, Agility Robotics Digit’s deployment at Amazon fulfillment centers, and Tesla Optimus’s in-house battery handling operations at Fremont represent the clearest documented data points. None of these programs operates at full automotive production rates yet, but each has crossed the threshold from internal demonstration to externally verifiable operation.
According to the Stanford AI Index 2025, global investment in embodied AI and physical AI systems grew faster than any other AI subcategory between 2023 and 2025, reflecting both the expanding capability of vision-language-action (VLA) models and the growing commercial recognition that software-only AI has bounded applications in physical manufacturing environments.
The training data scarcity problem is particularly relevant to EVST’s positioning. The Open X-Embodiment dataset (published by Google DeepMind and academic partners) aggregates robot demonstration data across dozens of research platforms, but industrial manipulation tasks (machine tending with metal workpieces, welding cell part placement, explosive-environment inspection) are dramatically underrepresented. Most demonstrations in the dataset come from tabletop pick-and-place experiments in research labs. According to industry observations, the gap between available industrial robot training data and what is actually needed to train reliable factory-floor policies remains one of the largest technical bottlenecks in the field.
EVST’s eight years of industrial robot deployment across 100+ countries provides a foundation that most embodied AI entrants lack: field experience with real manufacturing environments, established customer relationships in automotive, heavy industry, and process manufacturing, and a hardware certification track record (IATF16949, CE/SGS/TUV, ATEX/IECEx) that is directly relevant to getting new robot categories accepted on factory floors. For a broader view of where humanoid robots currently fit in industrial automation, see Humanoid Robots in Industrial Manufacturing: What They Can (and Can’t) Do in 2026.
EVST Embodied AI Product Family Overview
EVST’s embodied AI solutions line is organized around three product branches, each targeting a distinct industrial application cluster:
| Product Branch | Form Factor | Primary Applications | Target Environment | Deployment Horizon |
|---|---|---|---|---|
| Industrial Humanoid Robot | Bipedal, human-scale | Flexible assembly, machine tending, warehouse logistics | Factory floor, warehouse | Pilot H2 2026; limited production 2027 |
| Data-Collection Dexterous Hand | Multi-DoF hand platform | Teleoperation data capture, sim-to-real training, high-mix manipulation | Controlled factory workstation | Pilot H2 2026; limited production 2027 |
| Quadruped Robot Platform | Four-legged, mobile | Industrial inspection, hazardous environment patrol, field service | Oil & gas, chemical, power, mining, construction | General availability 2027 |
All three branches share EVST’s industrial integration philosophy: hardware designed for real manufacturing and field conditions, not research environments, and software architecture that connects to existing industrial control infrastructure (EtherCAT, OPC-UA, SCADA).

Industrial Humanoid Robot Use Cases
EVST’s industrial humanoid robot targets three application clusters where the bipedal form factor creates a genuine operational advantage over fixed-arm automation.
Flexible High-Mix Assembly
Traditional 6-axis robot arms and SCARA systems excel at high-volume, fixed-geometry tasks. When a manufacturer runs weekly SKU changeovers, assembling 200 variants of a product family with different fastener patterns, cable harness routings, or sub-assembly orientations, fixed automation becomes costly to retool. A humanoid robot operating from a shared workbench can, in principle, handle a broader task envelope with fewer mechanical reconfiguration cycles, provided the underlying manipulation policy generalizes adequately.
In practice, this benefit is real but bounded. Current VLA models can generalize across objects within a trained task category, but they degrade on out-of-distribution geometries. EVST’s humanoid deployment approach for 2026–2027 pilots focuses on assembly lines where the number of SKU variants is high but the manipulation primitives (insert, fasten, orient, transfer) are structurally similar across variants. This narrows the generalization gap to a tractable range.
Machine Tending Across Multiple Workstations
Fixed robot-per-machine configurations remain the dominant approach to CNC machine tending, press tending, and injection molding machine loading. They are effective but capital-intensive: each machine requires its own robot, end-of-arm tooling, safety guarding, and integration programming. A humanoid robot that can walk between machines and load multiple workstations with different fixture configurations represents a different capital structure: one robot serving multiple stations.
According to McKinsey Global Institute analysis on industrial AI deployment, flexible automation economics improve significantly as the ratio of robot units to production stations drops. Humanoid machine tending is a candidate for this economic profile in facilities with clustered machines of similar part families. EVST’s pilot program for humanoid machine tending targets exactly this cluster: 3–6 adjacent workstations with part families that share material and weight characteristics.
Logistics and Pick-and-Pack for Variable Carton Sizes
Warehouse logistics with variable carton dimensions remains one of the most commercially proven humanoid use cases, as demonstrated by Agility Digit at Amazon. EVST’s humanoid logistics applications target industrial shipping areas adjacent to manufacturing lines (finished goods staging, inter-facility transfer, and palletizing of mixed-dimension output), rather than pure fulfillment center operations.
Production-scale humanoid deployment across all three application areas is realistically a 2026–2028 horizon. Pilot programs, defined as operated-under-engineering-supervision deployments at select customer facilities, are available starting H2 2026. EVST is not positioning humanoid robots as a near-term replacement for its established XR series collaborative robots or EVST industrial robot arms, which continue to serve high-speed, high-repeatability, and heavy-payload applications where fixed automation is the correct tool. For context on how these platforms compare, see Humanoid Robots vs Industrial Robot Arms.

Dexterous Hand Platform: Data Collection and Industrial Manipulation
EVST’s dexterous hand platform is designed around two complementary functions: generating high-quality industrial manipulation data for embodied AI training, and performing dexterous manipulation tasks in production that fixed end-of-arm tooling handles poorly.
Hardware Architecture
The platform is a multi-degree-of-freedom dexterous hand with embedded tactile sensors, force-torque sensing at the wrist, and integrated camera modules for visual feedback during teleoperation. The design draws on EVST’s experience integrating force-torque sensing in cobot deployments, a capability refined across the XR series collaborative robot line for applications like assembly, testing, and deburring.
The hand is compatible with EVST’s humanoid robot platform as an end-effector, and can also be deployed as a standalone workstation unit mounted on a fixed or rail-mounted arm for data collection workflows that do not require bipedal mobility.
Teleoperation and Data Collection Pipeline
The primary data collection workflow is teleoperation-driven: a human operator controls the dexterous hand remotely through a haptic interface while performing industrial manipulation tasks at a factory workstation. The system records synchronized streams of hand pose, joint torques, tactile sensor readings, wrist force-torque, and workspace camera video. This multimodal data stream is the training input for sim-to-real policies.
According to industry observations, the scarcity of dexterous manipulation data with real industrial workpieces (metal parts, irregular castings, cable harnesses) is the primary differentiator between research-grade and industrially reliable embodied AI policies. EVST’s manufacturing customer base provides access to exactly these workpiece types in real production contexts, an asset that pure-software embodied AI developers lack.
For a detailed treatment of the technical pipeline from teleoperation data capture through sim-to-real training to autonomous deployment, see Embodied AI Data Collection: Teleoperation, Sim-to-Real, and Industrial Training Pipelines (2026).
Cross-Embodiment Compatibility
EVST’s data collection workflow is designed for alignment with the Open X-Embodiment dataset format, which allows manipulation demonstrations to be used across different robot platforms. This cross-embodiment compatibility is relevant for customers who want their captured data to accelerate policy training not only on EVST hardware but on standardized research benchmarks, and for EVST’s own goal of contributing high-quality industrial data to the broader embodied AI training ecosystem.
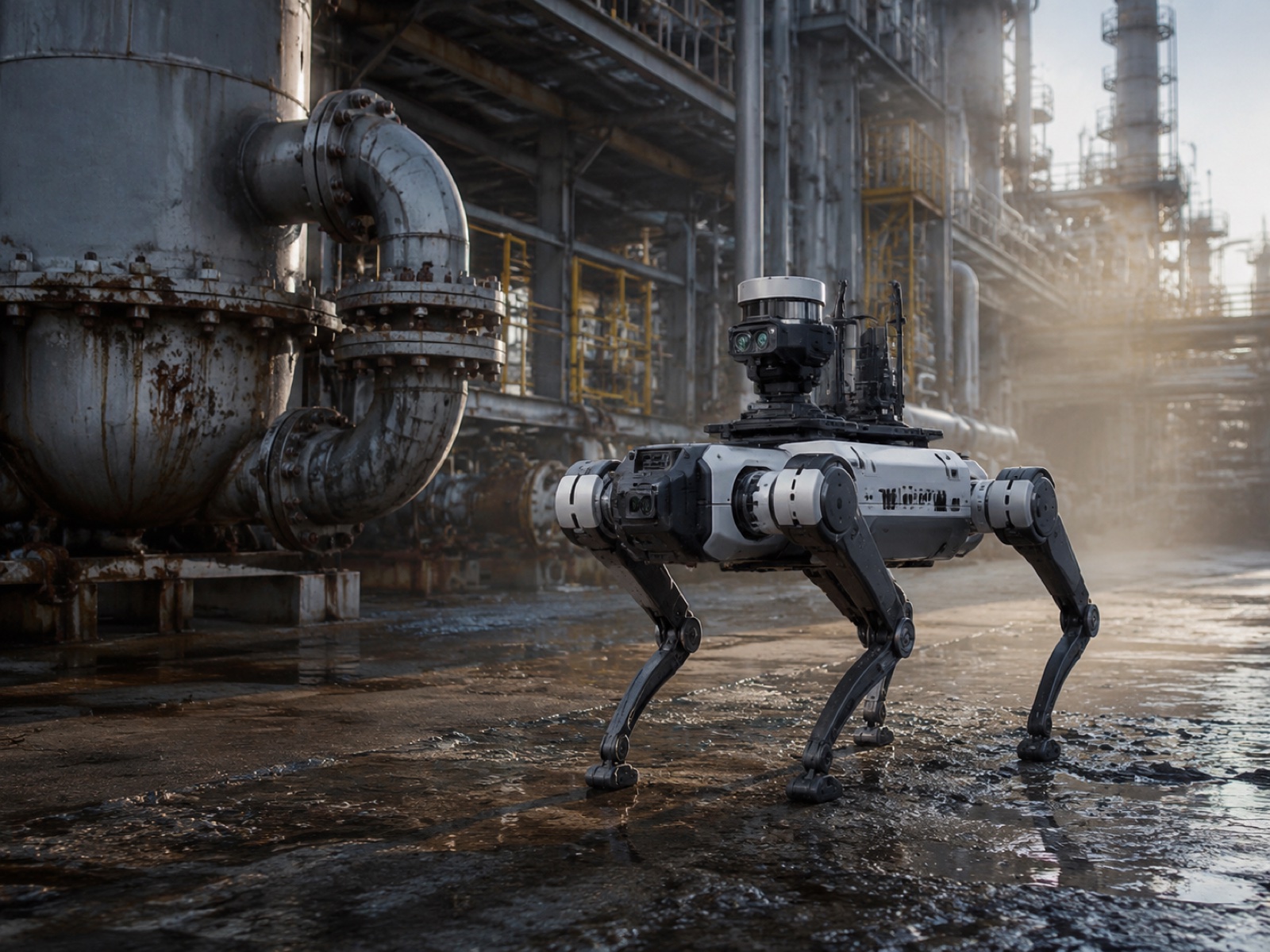
Quadruped Robot Platform: Industrial Inspection and Field Service
EVST’s quadruped (four-legged) robot platform targets industrial environments where wheeled ground vehicles cannot navigate and fixed sensors cannot cover: oil and gas processing facilities, chemical plants, power generation sites, mining operations, and construction sites. These environments require a robot that can traverse uneven terrain, climb stairs, and operate reliably in conditions that are hazardous for human inspectors.
Industrial Site Inspection
The core application is automated facility walkthrough: the quadruped follows a defined inspection route, captures readings from gas sensors, thermal cameras, acoustic emission detectors, and visual cameras, and transmits data to a central monitoring system. For oil and gas and chemical facilities, this addresses a genuine operational pain point. According to NIOSH occupational safety data, inspection tasks in confined spaces and hazardous areas account for a disproportionate share of industrial worker injuries and fatalities. Replacing routine inspection walks with a robotic platform removes workers from the highest-risk exposure scenarios without eliminating the inspection coverage.
EVST’s explosion-proof engineering experience, established through the XR-EX series collaborative robots carrying ATEX/IECEx dual certification and IP68 rating, provides a certification and design baseline that is directly applicable to quadruped platforms intended for Zone 1 and Zone 2 hazardous areas. The XR-EX series, where EVST was among the first domestic manufacturers to achieve ATEX/IECEx dual certification for a collaborative robot, provides a proof of process for bringing new robot categories through explosive-atmosphere certification. Quadruped ATEX certification is on EVST’s roadmap.
Field Engineer Dispatch Acceleration
Beyond routine inspection, EVST’s quadruped supports a hybrid deployment model: a remote field engineer uses the robot as a mobile sensor platform to assess a fault condition before dispatching physical personnel. The robot transmits live video and sensor data; the engineer diagnoses the problem remotely and either resolves it through robot-assisted actuation or dispatches the correct specialist with the correct parts, rather than sending a technician to discover what the problem is.
This model fits naturally with EVST’s global field engineer dispatch capability across 100+ countries. For customers in remote industrial sites (offshore platforms, mine sites, agricultural processing facilities), robot-assisted remote diagnosis compresses response times that would otherwise involve multi-day travel logistics.
Additional Field Applications
Beyond oil and gas, EVST’s quadruped platform addresses inspection needs in mining (underground tunnel surveillance, structural assessment), construction (site progress documentation, safety compliance patrol), and agricultural processing (large-facility monitoring where fixed camera coverage is impractical). Each environment places different demands on locomotion, sensor payloads, and communication infrastructure — factors that EVST’s pilot program scoping process addresses during pre-deployment site assessment.
How Embodied AI Connects to EVST’s Industrial Core
EVST’s embodied AI entry is not a pivot away from its established product lines. The three new families are designed to extend and complement the existing robot ecosystem, not replace it.
Humanoid and XR Cobot as Two-Tier Factory Deployment
In practice, the humanoid robot and EVST’s XR series collaborative robots serve different positions in the same factory cell. The XR cobot handles high-speed, repeatable, precision tasks: assembly operations where ±0.02 to ±0.05 mm repeatability is required and cycle times are fixed. The humanoid handles flexible, infrequent, or variable tasks in the same vicinity: unboxing incoming components, clearing exceptions from the cobot’s input queue, or performing an assembly step that changes weekly with product variants. This two-tier model is how EVST expects most pilot deployments to be structured through 2027.
Dexterous Hand Data Feeding Back to Industrial Robot Programming
Training data captured by EVST’s dexterous hand platform during teleoperation sessions is not solely for humanoid robot policy training. The same demonstration data can inform assembly path generation for EVST industrial robot arms, particularly for tasks where workpiece geometry variation makes fixed-path programming fragile. The connection between human-demonstrated manipulation and industrial robot programming has been a longstanding challenge in factory automation; EVST’s data pipeline is designed to serve both embodied AI policy training and conventional robot path optimization.
EVS-AI Architecture Extended to Embodied AI Inference
EVST’s EVS-AI welding intelligent system, which runs a self-learning engine with 1 kHz EtherCAT control, 3D vision auto-scan for weld seam identification, and SLAM-based autonomous navigation for walking-while-welding operations, provides the architectural template for the embodied AI inference layer. The real-time control loop, sensor fusion, and autonomous path planning developed for EVS-AI translate directly to the control requirements of humanoid and quadruped platforms. EVST is not building an AI control architecture from scratch; it is extending a production-tested architecture into new form factors.
Certification Baseline Carried Forward
EVST’s existing certification portfolio (IATF16949 automotive-grade manufacturing certification for the cobot production line, CE/SGS/TUV third-party certification across the product range, ATEX/IECEx dual certification for the XR-EX explosion-proof cobot series) represents a compliance baseline that new embodied AI platforms will extend. Humanoid robot safety certification is an open standards question: ISO 10218-3, covering AI-augmented robot safety, is in pre-development at ISO. EVST is monitoring this standards process and plans to engage as the draft matures, drawing on its existing CE and ATEX certification experience to position its humanoid platform for compliance ahead of the standard’s formal publication. For a detailed examination of how embodied AI and VLA models interact with existing industrial safety frameworks, see Embodied AI in Industrial Robotics: How VLA Models Are Changing Robot Programming.
Roadmap Signal: 2026 to 2028
EVST’s embodied AI roadmap follows a staged commercialization timeline with explicit caveats. These are planning targets, not contractual commitments, and depend on pilot program outcomes, supply chain development, and regulatory progress on humanoid safety standards.
| Period | Milestone | Product | Status |
|---|---|---|---|
| 2026 H2 | Pilot deployments with select industrial customers under engineering supervision | Humanoid + Dexterous Hand + Quadruped | Planned |
| 2027 | Limited production for humanoid robot and dexterous hand platform | Humanoid + Dexterous Hand | Target |
| 2027 | General availability for quadruped inspection platform | Quadruped | Target |
| 2028 | Production scale for humanoid in flexible assembly applications | Humanoid | Target |
| 2026–2028 | ISO 10218-3 standards engagement (AI-augmented robot safety, pre-development) | All embodied AI platforms | Ongoing monitoring + engagement |
The 2026 pilot phase is the immediate commercial priority. EVST is accepting pilot program inquiries now, with site assessment and configuration scoping conducted before any hardware commitment. Pilot terms cover engineering support, data ownership, and post-pilot commercialization options. For the broader context of who is deploying humanoid robots industrially and at what pace, see Generative AI in Industrial Robotics: Foundation Models, Code Generation, and the 2026 Landscape.
Frequently Asked Questions
When can I pilot an EVST humanoid robot in my factory?
EVST is targeting 2026 H2 for select pilot deployments with industrial customers. Full-scale production availability for humanoid robots is on the 2027–2028 roadmap. Interested manufacturers can initiate contact now at sales@evsrobot.com to join the pilot evaluation queue and begin site assessment.
How does EVST’s industrial track record translate to embodied AI?
EVST has deployed industrial robots in 100+ countries over eight years, including ATEX/IECEx-certified explosion-proof cobots (XR-EX series), an IATF16949-certified cobot production line, and the EVS-AI welding system with 1 kHz EtherCAT control and 3D vision auto-scan. These programs generated field deployment data across diverse manufacturing environments, the same data substrate that embodied AI systems require for reliable real-world generalization. Certification experience (ATEX/IECEx, CE/SGS/TUV, IATF16949) translates directly to the compliance process for new embodied AI platforms.
Is EVST’s dexterous hand for teleoperation training only, or production use?
The primary design intent is industrial data collection: teleoperation-driven demonstration capture for sim-to-real training pipelines. A secondary use case is production manipulation in high-mix, low-volume assembly where fixed end-of-arm tooling is impractical. Production readiness depends on the specific task and tolerance requirements. Most 2026–2027 deployments will focus on the data collection function, with production manipulation as a parallel evaluation track.
Can EVST’s quadruped robot integrate with my existing SCADA or DCS?
EVST’s quadruped platform is designed with industrial communication protocols in mind. Integration with SCADA and DCS systems (OPC-UA, Modbus, or site-specific protocols) is part of the deployment scope. Custom integration requirements are addressed during the pilot engagement’s site assessment phase. Contact sales@evsrobot.com for a technical pre-assessment of your facility’s integration requirements.
What is the data ownership model for training data captured in my facility?
Training data captured by EVST dexterous hand or humanoid platforms at a customer facility remains the property of the customer. EVST’s standard engagement terms include data confidentiality provisions consistent with manufacturing IP protection requirements. Customers can opt into data-sharing arrangements contributing to cross-embodiment datasets in exchange for accelerated model improvement, but this is not a requirement of the pilot program.
If you need similar products or project services — pilot evaluations across EVST’s three embodied AI product families (industrial humanoid robots, data-collection dexterous hand platforms, and quadruped inspection robots), or related configuration scoping — please contact us, we’ll provide expert support. Here are our contact details: email sales@evsrobot.com, message WhatsApp / WeChat +86 193 8162 6253, submit the contact form, or visit the product page at evsint.com/embodied-ai-solutions.
Last Updated: May 13, 2026