
By the EVST Editorial Team · Last updated: June 5, 2026
Collaborative robot safety is defined by the application, not the robot alone: a cobot is only safe in a given task after a risk assessment confirms it. ISO 10218 and the supporting ISO/TS 15066 set out four collaborative methods, safety-rated monitored stop, hand guiding, speed and separation monitoring, and power and force limiting. The right one depends on how closely people and the robot share space, and on the tooling and part the robot carries.
Why a Cobot Is Not Automatically Safe
The most common misunderstanding is that a collaborative robot is inherently safe. It is not. A cobot is designed to enable safe collaboration, but a sharp gripper, a heavy part, or high speed can still injure a person. According to ISO/TS 15066, safety is a property of the whole application: the robot, the end-effector, the workpiece, the speed, and the layout together. This is why a cell risk assessment is mandatory, not optional, before a collaborative robot runs near people.
The Four Collaborative Methods
| Method | How it keeps people safe | Typical use |
|---|---|---|
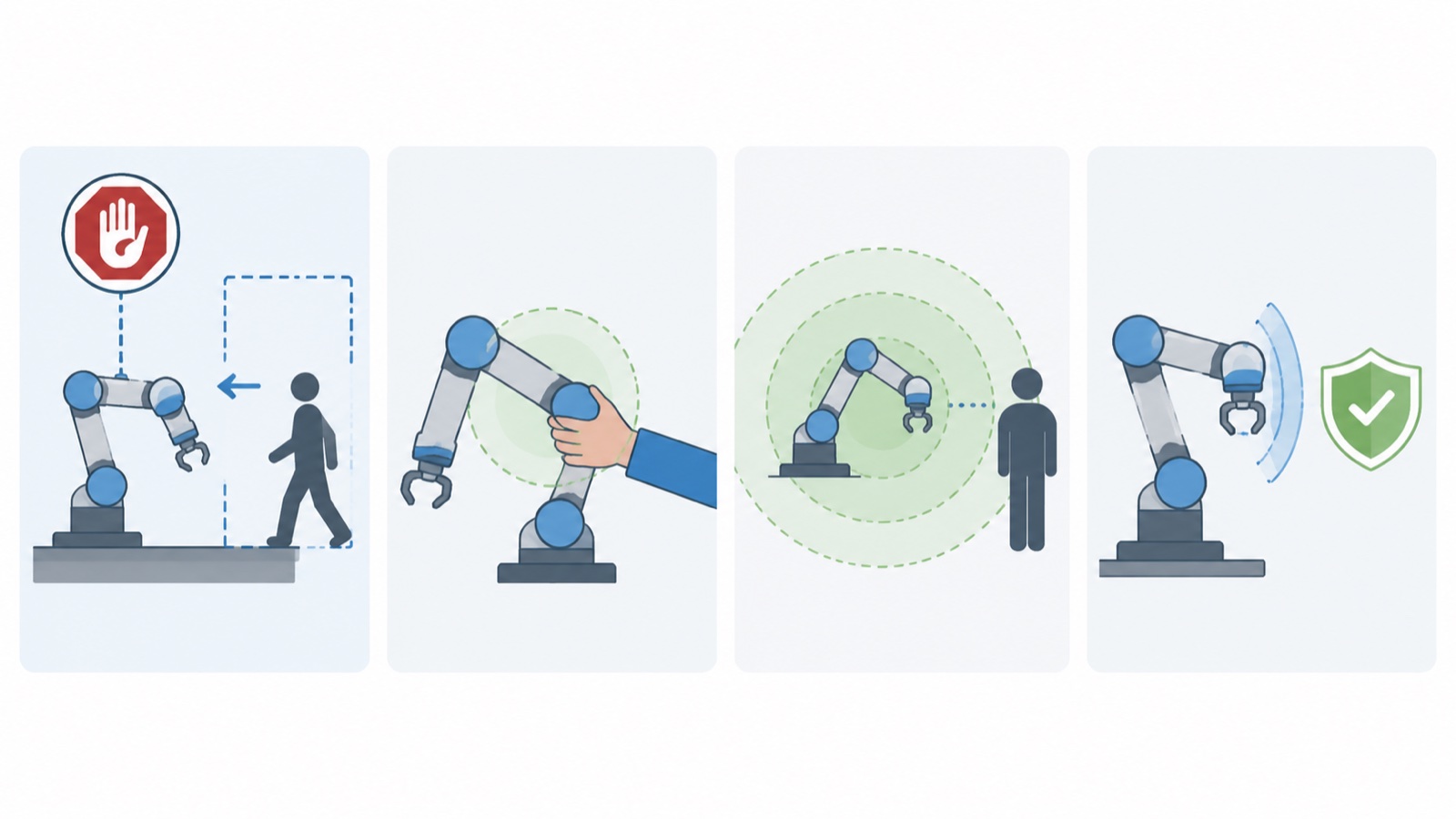
| Safety-rated monitored stop | Robot stops when a person enters; resumes when clear | Occasional shared space, mostly automatic work |
| Hand guiding | Operator moves the robot by hand under safe control | Teaching, guided assembly, lifting assist |
| Speed and separation monitoring | Robot slows or stops as a person gets closer | Frequent shared space with sensing |
| Power and force limiting (PFL) | Robot limits force so contact stays below injury thresholds | True side-by-side work, no fencing |
According to ISO/TS 15066, power and force limiting relies on biomechanical limits, the maximum force and pressure for each part of the body, which the robot must not exceed on contact. This is what allows fenceless operation, but it constrains speed and force, which is why high-throughput tasks often cannot stay within PFL limits and move to speed-and-separation or full guarding instead.
The Risk Assessment Process
A collaborative cell is assessed as one machine under ISO 10218-2. The process identifies hazards across the whole swept volume, including the tooling and part, estimates the risk, and applies the collaborative method and any additional measures needed to bring it to an acceptable level. In practice, after commissioning many cells, the hazards that surface are rarely the robot body itself; they are the gripper edges, pinch points between the part and fixtures, and the energy of a carried load. The assessment must cover these, not just the arm.
According to industry observations, the most frequent compliance gap is treating the cobot’s built-in force limiting as sufficient while ignoring a sharp or heavy end-effector that changes the contact risk. The end-effector and workpiece are part of the assessment, every time the task changes.
What to Confirm on a Collaborative Cell
- Documented risk assessment for the specific application, not just the robot.
- The collaborative method chosen and why it fits the interaction.
- End-effector and part hazards assessed, including edges, pinch points, and load energy.
- Speed and force settings validated against the biomechanical limits where PFL is used.
- Re-assessment whenever the tooling, part, or layout changes.
EVST builds collaborative robots designed for these methods, including an IATF16949 automotive-grade cobot line and explosion-proof XR-EX models for hazardous areas, and it supports cell-level integration so the safety design covers the whole application. For payload selection, see our cobot payload guide; for the cell hardware, the EVST robot cell safety packages.
Frequently Asked Questions
Is a collaborative robot automatically safe?
No. A cobot is designed to enable safe collaboration, but a sharp gripper, heavy part, or high speed can still cause injury. Under ISO/TS 15066, safety is a property of the whole application, the robot, end-effector, workpiece, speed, and layout together, so a cell risk assessment is required before a cobot runs near people.
What are the four collaborative methods in ISO/TS 15066?
They are safety-rated monitored stop (the robot stops when a person enters), hand guiding (the operator moves the robot under safe control), speed and separation monitoring (the robot slows or stops as a person approaches), and power and force limiting (the robot limits contact force below injury thresholds). The right one depends on how closely people share the robot’s space.
What is power and force limiting?
Power and force limiting (PFL) keeps any contact between the robot and a person below biomechanical injury limits defined in ISO/TS 15066. It allows fenceless operation but constrains speed and force, so high-throughput tasks often cannot stay within PFL limits and instead use speed-and-separation monitoring or full guarding.
Do I need a risk assessment for a cobot?
Yes. A collaborative cell must be risk-assessed as one machine under ISO 10218-2, covering the robot, end-effector, workpiece, speed, and layout. The assessment must be repeated whenever the tooling, part, or layout changes, because those can change the contact risk even if the robot does not.
What is the most common cobot safety mistake?
Relying on the cobot’s built-in force limiting while ignoring a sharp or heavy end-effector that changes the contact risk. The gripper edges, pinch points between part and fixtures, and the energy of the carried load are frequently the real hazards, and they must be included in the risk assessment, not just the robot arm.
About the author: This guide was prepared by the EVST Editorial Team. EVST (EVS TECH CO., LTD) is a Chengdu-based robotics manufacturer founded in 2018, producing collaborative and industrial robots exported to more than 100 countries, with CE, SGS, and TUV third-party certification.
Last updated: June 5, 2026. This guide is general and does not replace a site-specific risk assessment by a qualified safety engineer against the current ISO 10218 and ISO/TS 15066 standards.