| Content | Main Technical Parameters and Range | Note |
|---|---|---|
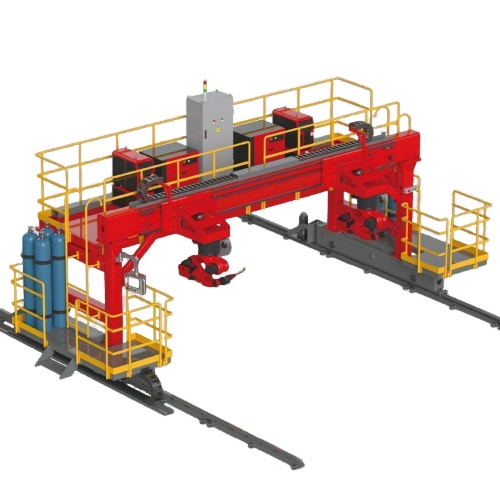
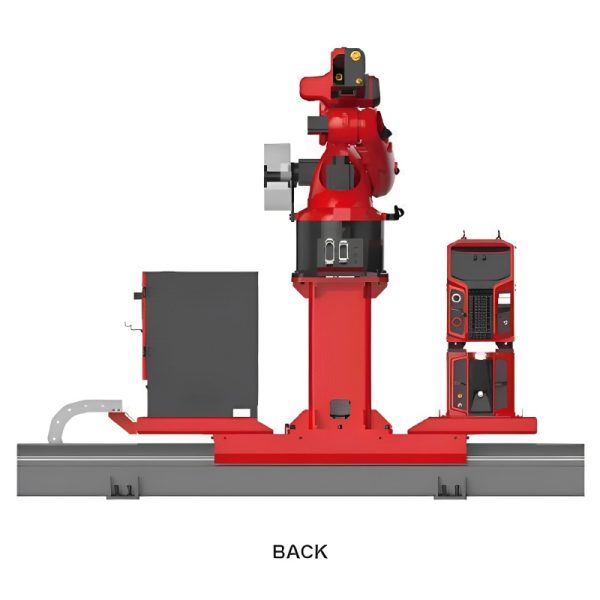
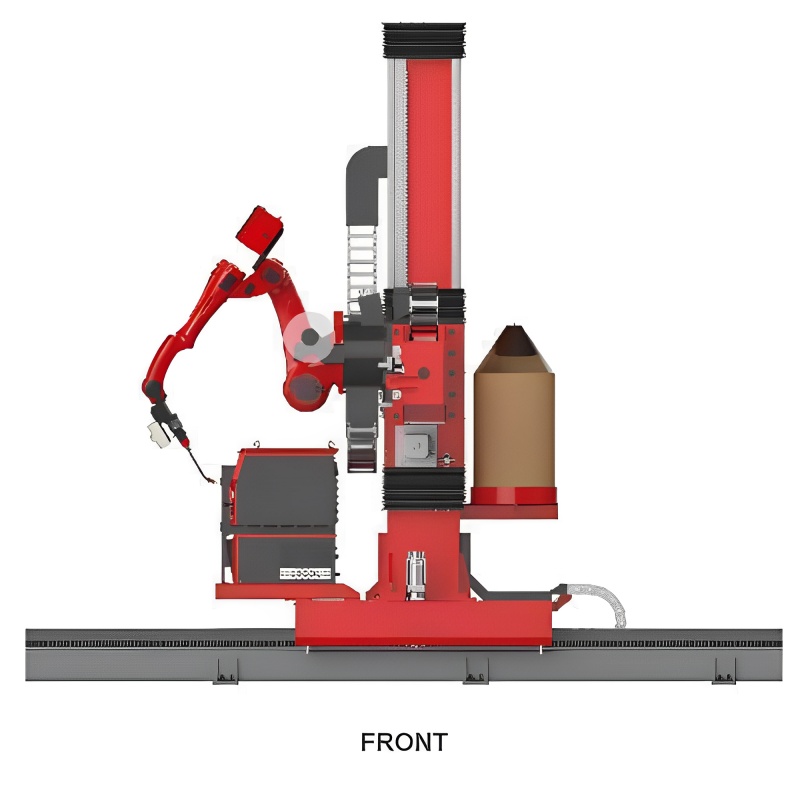
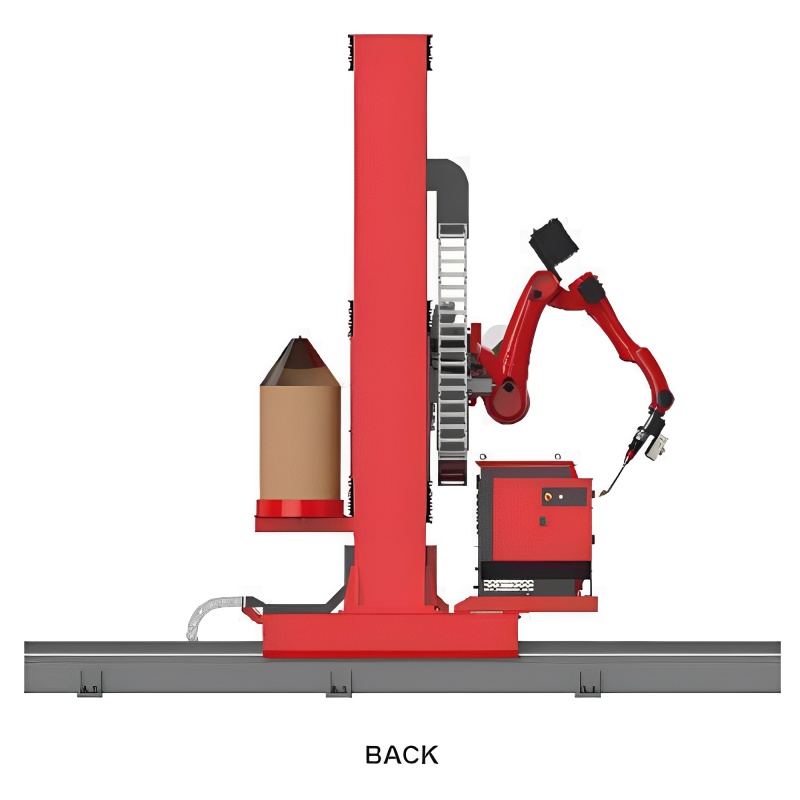
| Basic Parameters | Degrees of Freedom: 7 Axes, 8 Axes, 9 Axes, 7 Axes & 8 Axes optional | |
| Overall Machine Power: 31kw, 33kw, 36kw | ||
| Maximum End Effector Load: 12kg | ||
| Operational Power Supply: Three – Phase Five – Wire System 3x380V + 10950Hz | ||
| Visual Performance | Vision (Standard Configuration): /, ≤0.5mm, ≤0.5mm | |
| Scanning Frame Rate: /, 2000 Frames/Second, 2000 Frames/Second | ||
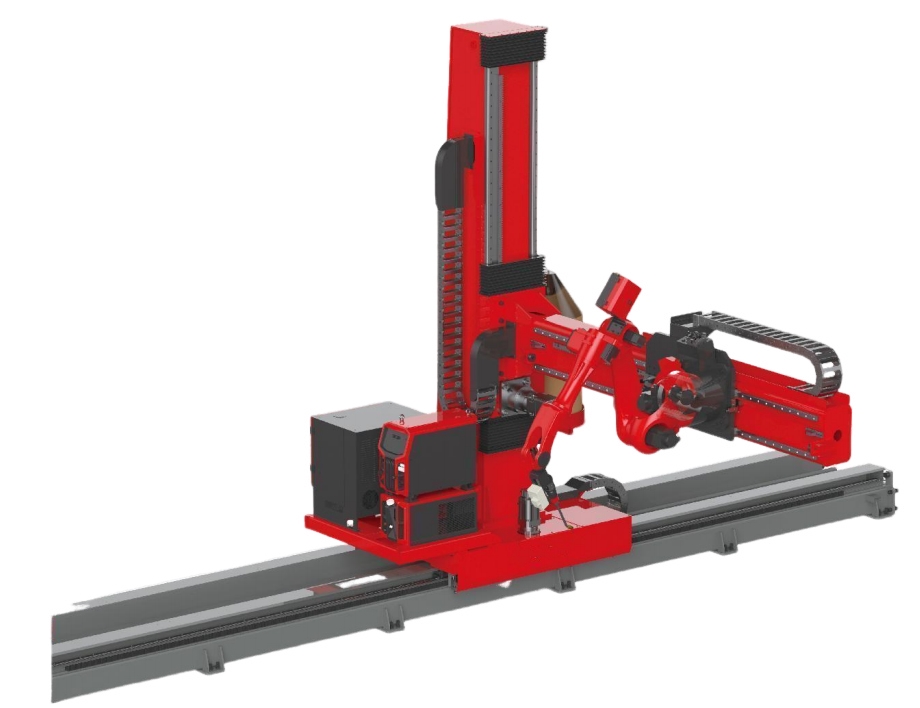
| Robot Arm Extension Range: R = 1465mm, Depends on the robot model chosen | ||
| Mobility Performance | Track Length: 6m/8m/12m/14m/16m | Selected based on the workpiece condition |
| Track X – Axis Movement Speed: ≥20m/min | Determined by design | |
| Cantilever Y – Axis Movement Speed: /, ≥12m/min, ≥12m/min | Y – Axis travel designed based on the workpiece condition | |
| Column Z – Axis Movement Speed: /, /, ≥8m/min | Z – Axis travel designed based on the workpiece condition | |
| Application Environment | Ambient Temperature: 0°C to +45°C(Operating), -20°C to +60°C(Transport and Storage) | |
| Relative Humidity: ≤90% RH (Non – Condensing) |