
Source: metrology.news
Industrial robotics is quickly gaining momentum and being adopted by different manufacturers in various industries. This is mainly because they are more efficient and make work easier compared to relying on human effort. These industrial robots are used to ensure that tasks like packing, sorting, picking, and placing among others are done right.
As a manufacturer, industrial robots are a great way to improve production and ensure that all your products are up to standard. However, when it comes to industrial robotics there are a few aspects you need to keep in mind. Some of them include accuracy, repeatability, and resolution. These aspects help make the running of your industrial robots easier and faster. Learning more about them is a great next step to ensure that as a manufacturer you can make it work for you.
What is Accuracy in Robotics?
Source: www.machinedesign.com
Accuracy refers to the capacity of a robot to place its wrist end within the work volume at the desired target point. It works in conjunction with spatial resolution. Accuracy relies on robot technology and how closely the control increments can be specified. This applies to each of the joint movements. However, the mechanical inaccuracies that involve the quality of output of the robot for the moment are excluded.
Resolution and Accuracy

Source: metrology.news
Accuracy is described as half of the resolution of the control. This is putting into consideration the worst case where the target point is directly between two points of control. Mechanical inaccuracies with a statistical distribution require more practical considerations, in which case accuracy is classified as half of the spatial resolution.
In robotics, precision is often confused with resolution and repeatability. A robotic system’s final accuracy depends on a few factors. They include its technical inaccuracies, the algorithms for computer control, and the resolution of the system.
What Causes Mechanical Inaccuracies?

Source: www.iotworldtoday.com
The mechanical inaccuracies are mostly caused by the backlash in the joints of the manipulators and the bending of the ties. Backlash is found in gear mechanisms, leadscrews, and hydraulic drive actuators. The key design requirement for the link is the minimization of the link bending, as any deflection of the link due to the load at the end of the robot causes positional errors. However, a greater rigidity of the relations can not be achieved by a drastic increase in their mass.
A larger mass produces an increase in the arm’s time response. Due to round-off errors in the computer, control algorithms could trigger position errors. When a robot controller uses scaled integer representation of Cartesian and angular coordinates, machine round-off errors could be important. If floating-point representation is used by the computer, then the round-off errors would probably be negligible.
Effects of External Influences on Accuracy

Source: www.forbes.com
Accuracy is influenced by external variables as well. With the extended configuration, that becomes more meaningful on the wrist point. The precision decreases within the work volume, from the closest location of the arm of its foundation. It is then directed to locations beyond the work volume range.
If the motion cycle is limited to a limited work range, accuracy is increased, while it decreases if the load borne by the robot becomes significant. The accuracy of the location depends on the position in the envelope of the workspace.
For this purpose, without using sensors, robot off-line programming is hard to do. It is possible to group the causes of location error affecting precision into four groups which include: digitization error, stochastic kinematic error, deterministic kinematic error, and calibration error.
As the axes of the assembly robots are mostly vertical, precision is marginally better because external influences and mechanical inaccuracies are less affected; but this is not enough to execute problem-free certain parts mating applications such as peg-in-hole.
What is Resolution in Robotics?
Source: ein.org.pl
Resolution is the smallest improvement in the movement that the computer can produce. Since machines use digital controllers and discrete feedback motors, the resolution is the quantity at which all movements are made. If the control resolution of the device is n, then all the movements are integer multiples of n.
This is not to say that the resolution is the lowest part of any scheme, but rather the largest. If the feedback encoder only has an accurate resolution of 1 micrometer, a computer controller that can measure a movement of 0.1 micrometers would not be able to shift the machine accurately and raise it by 0.1 micrometers.
The control system would never “see” a tiny movement like that. Hence, in interpreting machine output statistics, one must be very careful.
What is Repeatability in Robotics?

Source: www.linearmotiontips.com
Repeatability is an accuracy-associated mathematical concept that explains how a point is replicated. If a robot joint is programmed to shift several times from a certain point, you can do it at the same angle. It will be done all under similar environmental conditions which will result in different displacements.
While a goal is often missed by a wide margin, we conclude that the repeatability is high and that the accuracy is low if the same mistake is repeated. The error concerning absolute coordinates is not defined by repeatability. The positional deviation from the average of displacements is device repeatability.
Most manufacturers of robots provide a numerical value for their robots’ repeatability rather than their accuracy. The reason is that the precision depends on the specific load the gripper carries. A heavier weight induces larger deflections of the robot connections and greater load on the joints, degrading the precision, but the repeatability value is almost independent of the grip value. Robot repeatability would typically be better than precision, usually calculated in hundredths of an inch.
Roles of Accuracy, Repeatability, and Resolution in Different Applications of Robots

Source: control.com
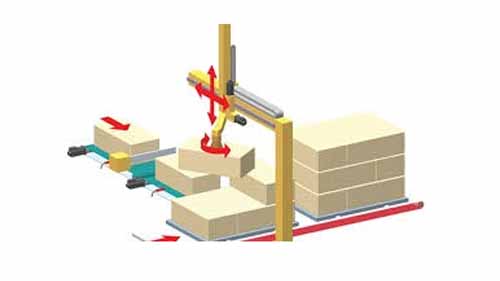
When it comes to robotics and the application of these aspects, you find that they are always better together. With a combination of accuracy, repeatability, and resolution, the industrial robots can work with precision ensuring that the tasks are carried out well. When working with a pick and place arm, these aspects will help make the processes easier. As a manufacturer, it is important to ensure that you have all these boxes checked for an easier experience.
Accuracy
Repeatability
Resolution
Accuracy will ensure that the robot’s wrist is placed correctly
Repeatability is meant to ensure that the tasks are done repeatedly with ease
Resolution will help make small adjustments during this process to ensure that the accuracy is on point
With this in mind, it is important to ensure that your robot devices feature these crucial aspects. You’ll be in a better position to ensure that all the work is done right and increase your production processes.
Conclusion
When it comes to industrial robotics, they play a big part in the development of different manufacturing processes. They provide amazing benefits that are important in ensuring that productions are increased. However, to get the best use out of this, the use of key aspects like accuracy, repeatability, and resolution is crucial.
As discussed earlier these aspects have to feature in your operations to ensure that you enjoy the full benefits of industrial robots. As a manufacturer, being in tune with what is required of you is essential. Take your time to learn these aspects and what they mean when it comes to working with robotic technology.